視覚認識技術によるロボットの知能化
知能ロボットなどの,複雑な環境下で自律的 に行動できる知能システムを研究しています.カ メラや距離センサなどで環境を認識したり,状況 に応じて臨機応変に行動を計画したりするための 高度な情報処理が,知能システム実現のための鍵 となります.具体的には,視覚移動ロボット,屋外視覚ナビ ゲーション,人間とロボットの協調作業などを研究しています.(担当:三浦純教授)

共棲ロボット(=弱いロボット)とそのインタラクションデザイン
人とロボットとの共棲を目指して,自らはゴミを拾えないものの,まわりの子どもたちの手助けを上手に引き出しながら, 結果としてゴミを拾い集めてしまう〈ゴミ箱ロボット〉,子どもたちに昔話を語り聞かせようとするも, 時々,大切な言葉を物忘れしてしまう〈トーキング・ボーンズ〉など,お互いの〈強み〉を引き出し, その〈弱さ〉を補いあう「共棲ロボット」(=弱いロボット)とそのインタラクションデザインの研究を進めています.(担当:岡田美智男教授)




モーションメディア・画像メディア処理
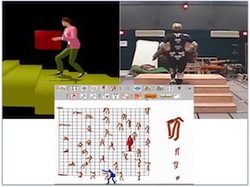
「人間・環境と視覚メディアとの新たな関わりを考える」をその基本コンセプトとして, CG,画像・映像,人間動作を中心とした次世代デジタルメディア環境の基盤となる, 新たな理論,システム,およびアプリケーションの開発を目指しています. 具体的には,機械学習に基づくモーションデータの特徴解析と自動生成などを研究しています. (担当:栗山繁教授)
知覚心理学・バーチャルリアリティ
私たちが世界をどのように知覚し,他者とどのようなコミュニケーションをしているのかを 科学的に解明しようとしています.私たちの知覚や社会性は,身体の形状やイメージ,内的感覚に強く規定されています. この知覚の身体性に着目し,運動する身体としての人の知覚の研究(Mobile Observerの科学),リアリティを科学的に解明し, 操作・制御するための研究(身体リアリティの科学),そして実空間でもメタバースでも社会にとって重要な共感や公平性に 関する認知機構や神経機構を解明する研究(潜在的社会性の科学)を行っています. 今後,バーチャルリアリティやロボティクスによって私たちの身体や身体イメージが変わっていくことが予想されます. こうした身体の変化がどのような心の変化,行動の変化,社会の変化をもたらすかを研究し,適切な未来社会の設計に貢献したいと思っています. 具体的には,Mobile Observerの科学,身体リアリティの科学,潜在的社会性の科学などを研究しています. (担当:北崎充晃教授)


ヒトの運動制御の計算論的神経科学
スポーツ選手のダイナミックなプレーやピアニストの繊細な指の動きはもちろんのこと, 私たちが日常行なうありふれた動作でさえ,実に複雑で巧妙です.このような人間の巧みで多様な運動を実現している, 脳神経系の優れた認知や運動制御や学習のための情報処理メカニズムを理解,応用することを目指して研究を進めています. そのために,描画運動やスポーツなど様々な運動を計測,解析する実験を行い, それを基に運動制御の情報処理機構を再現する数理モデルの構築を目指しています. さらに,これらを応用したシステムの実現を目指し,特に現在は画像認識技術を併用した筋電義手システムの開発に取り組んでいます. 具体的には,ヒト腕の随意運動の計算論的研究,ヒトの運動学習原理の解明,神経回路モデルを用いた運動学習モデルなどを研究しています. (担当:福村直博准教授)


ユビキタス・コンピューティング
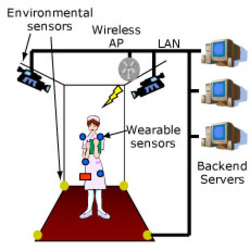
現在,我々を取り巻くありとあらゆる「物」が情報処理能力を持つようになってきており, いわゆる「ユビキタス社会」が到来しつつあります.このような環境の中では,身の回りの物が暗黙的に我々の生活をサポートし, 緊急時の対処や事故などを回避することができるようになります. そこでユビキタス社会において「人を支援するシステム」の実現を目指して,センサ・ネットワークを介して得られる 実世界の情報処理方法に関する研究や,実世界の状況表現に関する研究,また,その際のコンピュータシステムの在り方について の研究を行っています. 具体的には,行動・状況認識による生活支援システムの開発,生活支援アプリケーションの実行・開発環境の研究, ユビキタスシステムのための組み込みシステムなどを研究しています. (担当:大村廉准教授)
システム工学の応用による産業機械の高度化
システム最適化・制御論に関心があり,主に産業応用を指向した研究課題に取り組んでいます. 産業機械の高精度化と省エネルギー化を目的としたロバスト適応制御,産業機械の最適動作軌道生成と制振制御, 屋外作業を目的とした自律移動ロボットの設計・制御などについて研究しています. (担当:内山直樹教授)



精密アクチュエータ・精密メカトロニクス
製作容易性,操作性,保守性などの観点からの高い利便性と,高精度・高速といった高い運動性能を両立する,
実用的で優れた運動システムを実現し,機械の活用範囲を広げ,快適な社会づくりに貢献することを目指しています.
そのために,以下の研究に取り組んでいます.
(a) メカニズムやアクチュエータの特性が支配的な性能を極限的に追求するメカニズム,アクチュエータ
(b) 顕著な非線形性をもつメカニズムやアクチュエータの特性を活用し,簡単に高性能を実現する制御系設計法
(c) 利便性が高い高機能測定システム
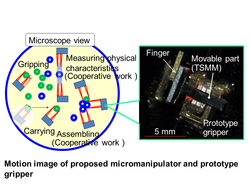
具体的には,レーザと感温磁性体を用いたワイヤレスアクチュエータを利用したマイクロマニピュレータ,
実用的な高性能制御系設計法,長期安定運用に適した精密ロボットなどを研究しています.
(担当:佐藤海二教授)

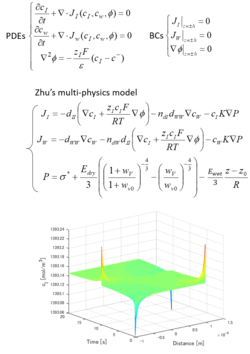
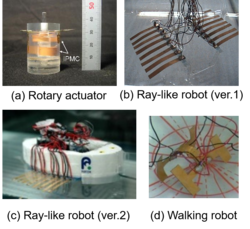
ソフトロボティクス・高分子アクチュエータ
圧電材料(Piezoelectric materials)や電場応答性高分子(Electroactive polymer, Electromechanically-active polymer, EAP),
熱応答性高分子繊維などのスマート材料(Smart materials)を中心としたアクチュエータとセンサに関する基礎と応用について研究しています.
基礎としては,スマート材料の数理モデルの構築,物理パラメータ推定,制御法を研究します.
応用としては,ロボティクス応用や,産業機械への応用を目指したメカトロニクス応用を行っています.
研究室では,おもに次のテーマについて研究しています.
1.高分子アクチュエータ・センサの数理モデリングと制御
2.高分子アクチュエータ・センサのロボティクス・メカトロニクス応用
3.圧電材料・電磁アクチュエータを用いたセンサレス振動制御
具体的には,高分子アクチュエータ・センサの数理モデリングと制御,高分子アクチュエータ・センサのロボティクス・メカトロニクス応用,
圧電材料・電磁アクチュエータを用いたセンサレス振動制御などを研究しています.(担当:高木賢太郎教授)
メカトロニクス・制御工学・アクチュエータ
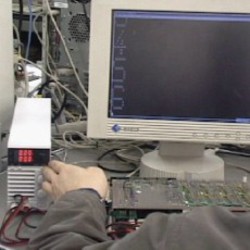
近年,高性能で安価なコンピュータやその周辺機器の出現により,より高度な制御系を構築・実現できるようになってきました.
それに伴い,そのような高度な制御系に対して有用な制御対象のモデルを作成する重要性も高まっています.
こうした背景から,以下のことを研究しています.
1.移動ロボットの経路計画・制御
2.高分子アクチュエータのモデル化と制御
3.システム同定のための実験計画
4.学習による行動獲得と制御
具体的には,移動ロボットの経路計画・制御,高分子アクチュエータのモデル化と制御,システム同定のための実験計画
などを研究しています.(担当:佐野滋則准教授)


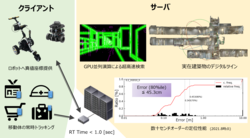
クラウド型定位インフラストラクチャシステムの構築
これまでのところロボティクスやIoTによる生産現場の自動化や効率化は,潤沢な資本を持つ大企業に限られています.
その原因は自動化に必須の移動体(ロボットや人)の定位(位置推定)にかかるコストが大きいためです.
本研究では,特に採算性に優れる新しい定位技術として,環境への物理的なインフラストラクチャの敷設が不要なサーバ・クライアント型の定位システムを開発します.
クライアントはセンシングデータをクエリとしてサーバへ位置を問い合わせ,サーバは事前準備した座標付き画像DB群から最類似画像を
GPUの並列演算により高速に検索し座標値を返します.目下の目標は,定位精度10cm以内,応答時間1秒以内の実現です.
この定位技術は,導入コストと運用コストを低く抑えたまま,生産圏(工場,倉庫)や生活圏(大学,病院,地下街,駅,空港,複合施設)に導入可能で,
フリスクサイズのクライアントモジュールを備えた移動体を10cmのオーダーで永続的に定位・トラッキングできます.
物品搬送の自動化はもちろんのこと,人物・移動体の恒常的な追跡・記録による動態分析への利用,定位サービスのサブスクリプション提供による
シェアリングエコノミーの活性化,ライフログ,行動変容,EBPM,行動的生体認証による新しいセキュリティサービス,など新産業創出の基盤となることが期待できます.
(担当:高橋淳二准教授)
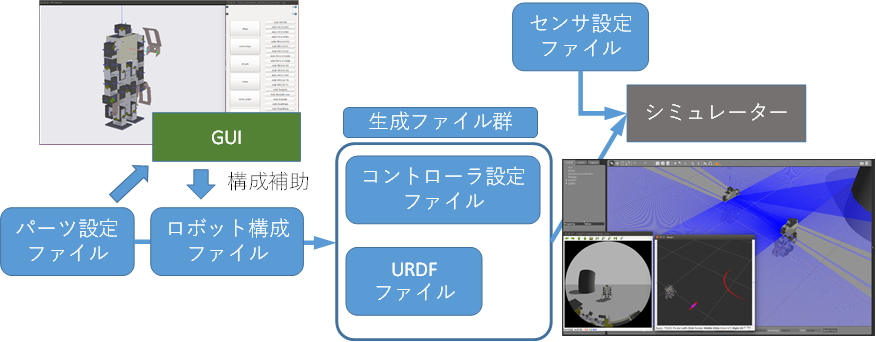
ロボットシステム構築・ヒューマノイドロボットの運動制御
ロボットが有効に働ける分野の開拓,新たなロボットの使い方,新しいロボットの作り方についての研究・開発を通じて,
豊かな社会の実現に役立つロボットシステムを構築することを目的としています.
ロボットの構築方法として,ロボットの組合せによる構築システムをシミュレーターと連携させることによりタスクを行うことのできる
ロボット構成の自動構築を行っています。また,構成が分かっているシステムの作業ロボットを用いた自動構築についても進めていこうと考えています.
ロボットの使い方として,多自由度でかつ安定制御が必要とされるヒューマノイドロボットについて,ロボットシステムとしての構築方法と制御アルゴリズムの研究を
行うことによって,複雑なロボットシステムを便利に使えるようになる研究を行っています.
具体的には,ヒューマノイドロボットの自律的動作構成,シミュレータを用いた環境認識と歩行動作,環境認識と歩行動作の統合システム,
ヒューマノイドロボットの操縦・タスク実現などについて研究しています.
(担当:垣内洋平教授)

HRI/HAIによるコミュニケーションの構成的理解
人とロボット,人とエージェントの親和的な関わりを議論するHuman-Robot Interaction,Human-Agent Interactionを専門の領域としています. 人との関わりを志向するロボットやメディアを作りながら,人のコミュニケーションの性質や人間の行動メカニズムを解明する 「HRI/HAIによるコミュニケーションの構成的理解」に関する研究を進めています. 具体的には,遠隔共食コミュニケーションの場を調整する仲介エージェントの構築, 内気な人でも楽しく会話できるコミュニケーション促進ロボットの開発,多人数会話の沈黙を修復するコミュニケーション媒介ロボット などを研究しています.(担当:大島直樹講師)
![]()
![]()